
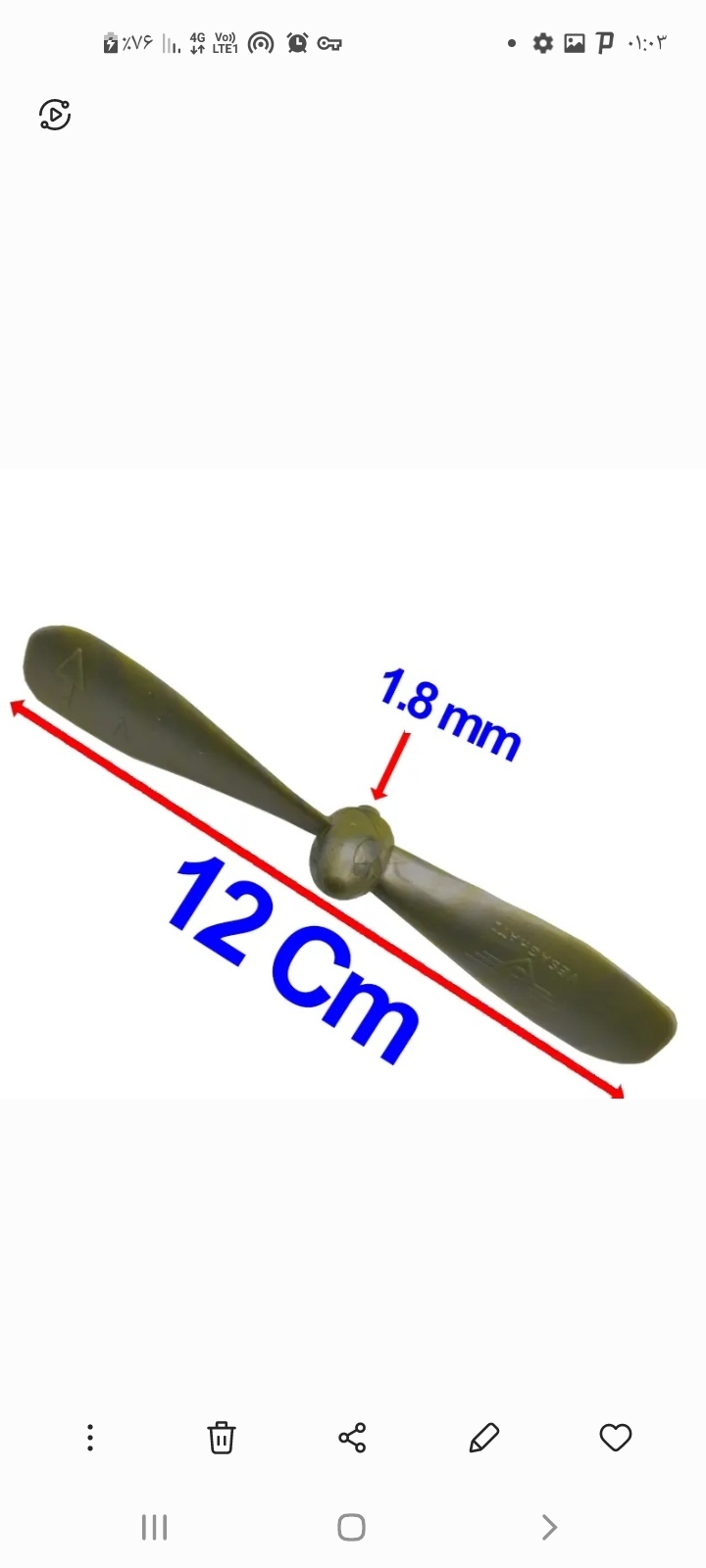
ملخ پیشران دو جهته 12 سانتی متری غیر پروازی ربات بدون گیربکس بسته ۴ عددی
۸۰,۰۰۰ تومان
ملخ پیشران دارای دو مدل ساعت گرد و پاد ساعت گرد است که جهت حرکت ملخ پیشران روی شان با یک فلش نشان داده شده است در هر دو مدل ملخ پیشران اگر در جهت صحیح بچرخند باد را به شدت به عقب میرانند و همین امر باعث جلو رفتن ربات میشود هر چه ارمیچر متصل به آن سریعتر بچرخد عمل جلو رفتن بهتر انجام میشود قابل ذکر است که این مدل ملخ پیشران برای پرواز مناسب نیست ولی در عوض با استفاده از سرعت ارمیچر به ربات این امکان را میدهد که از گیربکس استفاده نکند و سبک تر شود . لازم به ذکر است که از این مدل ملخ پیشران اگر در جهت معکوس استاندارد استفاده شود همانند پنکه باد نمی زند بلکه باید از جلو برای آن سوراخی ایجاد کرد و بر عکس جا زد . رباتیک نو robaticno درصدد است با دادن اطلاعات پایه ای شما را با اصل مطلب آشنا کند تا شما بتوانید با استفاده از آن ها موارد کاربردی هر قطعه را به سادگی حدس بزنید و از آنها برای اجرای طرح های بکر و جدید بهره ببرد چرا که با وجود سرعت تولید تکنولوژی در جهان بهتر است حداقل از تکنولوژی موجود کمال بهره را ببریم و حالا که نمیتوانیم تکنولوژی پایه داشته باشیم حداقل استفاده از همین را در پیشبرد اهداف والا به کار گیریم به یک مثال ساده دقت کنید چرخ اختراع شده ولی ما نباید خود را دردسر دهیم تا چیز دیگری به جای چرخ اختراع کنیم بلکه از همان برای ساخت رباتی استفاده کنیم که تا به حال کسی به فکرش نرسیده است . امروزه با وجود این همه مدارهای آماده و ماژول های تخصصی دیگر در بخش طراحی آنها نباید وقت گذاشت بلکه باید در بهبود کیفیت کار مدار مربوطه پرداخت . پس با بهره از مدار تخصصی مداری جدید ایجاد کنیم .
افزودن به سبد خرید
- نظرات
هنوز نظری ثبت نشده
اولین نفری باشید که نظر میدهید
ثبت نظر